半田(しろめ)の人です。
下書きに機体紹介があって忘れてたので投稿します。
未だまとも動いてない新しいハーフマウス擬き「錫蓮華」の紹介です。
後輩用に最後ハーフマウスのデータだけ残しておきます。
機体の全体図



ハーフマウスって小さく軽いんですね。
軽すぎて衝突しても壊れる心配を感じませんでした(壊れましたけど)
テクニカルデータ
概要
標準的な構造、Miceの後輩にデータを残すように作ったものです。
あとは社会人1年目で新しい制御考えるの無理だろうなーって思ったのでしろめくんに構造は似せました。
サイズ
Width : 39mm, Length : 58mm, Height : 22mm前後
質量
16g
CPU
STM32G491CEU6(170MHz)
壁センサ
OSI5FU3A11C + LTR-4206E
ジャイロ
ICM20689
エンコーダ
AS5047
モタドラ
DRV8835
モータ
MK06-4.5
バッテリー
Lipo 1S 100mAh
ピニオンギア
M0.3 9T(アールティショップで購入)
スパーギア
M0.3 39T(DMMのアクリル)
吸引モータ
MK06-4.5に変更
軸受
DDL-310(モノタロウで購入)
シャフト
平行ピン(太陽ステンレススプリング、モノタロウで購入)
モノタロウのスーパシャフトはキツキツですきまはめの公差でもきつかったです。
鉄スペーサ
CF-502.5ZE(モノタロウで購入)
磁石
ネオジム磁石(N35H、アールティショップで購入)
回路図と配線図
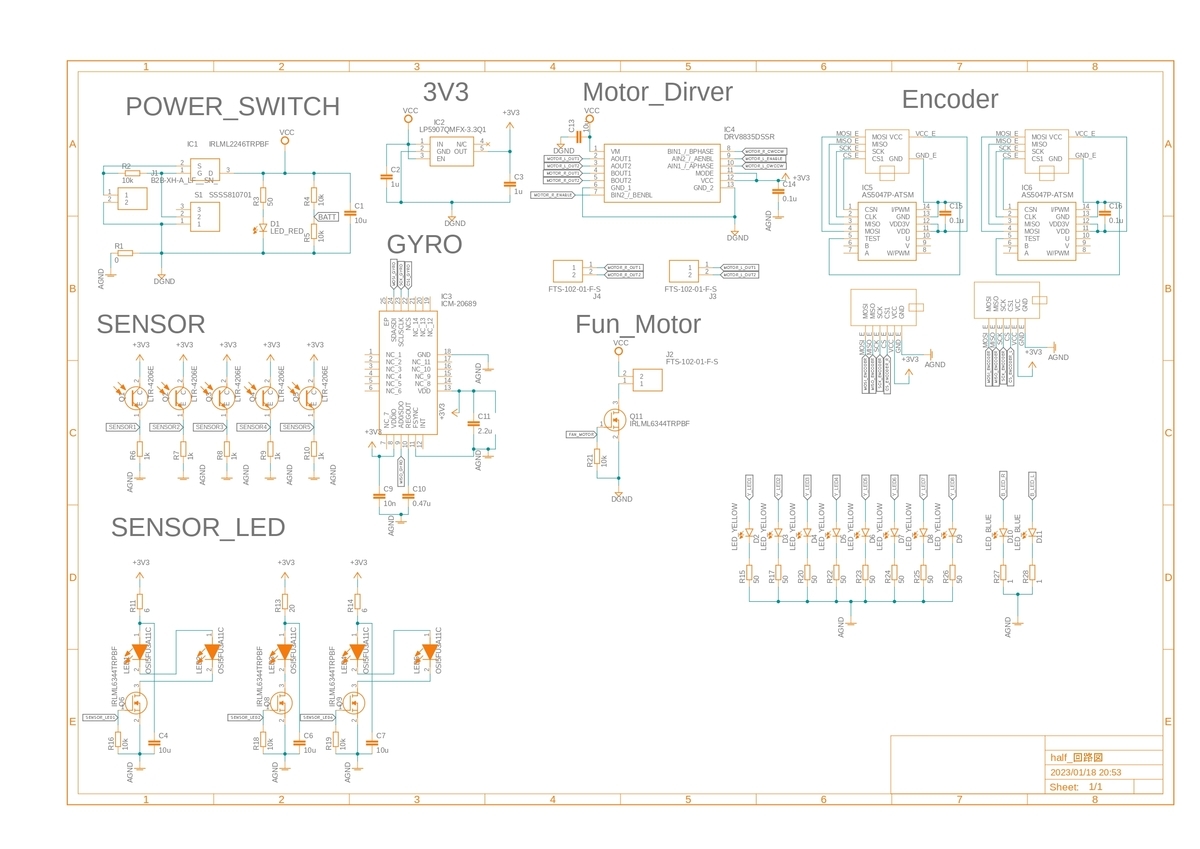
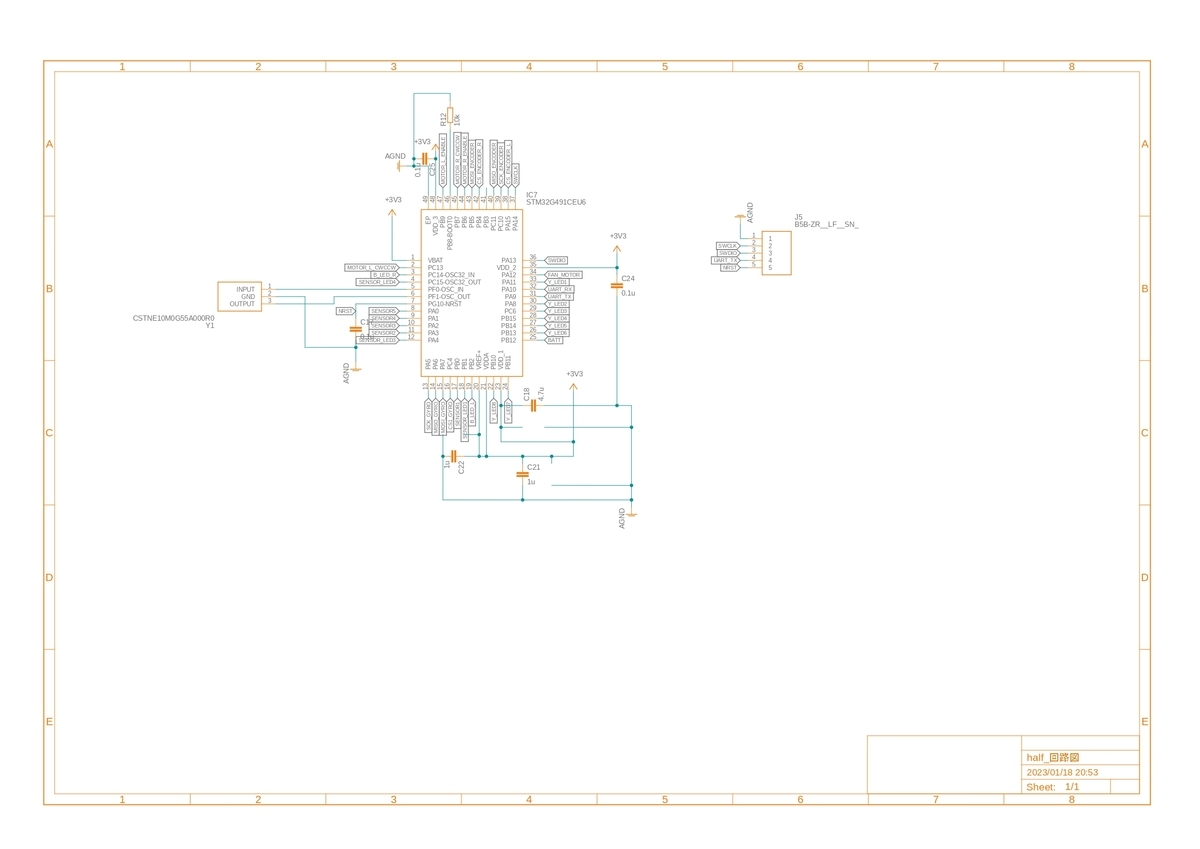
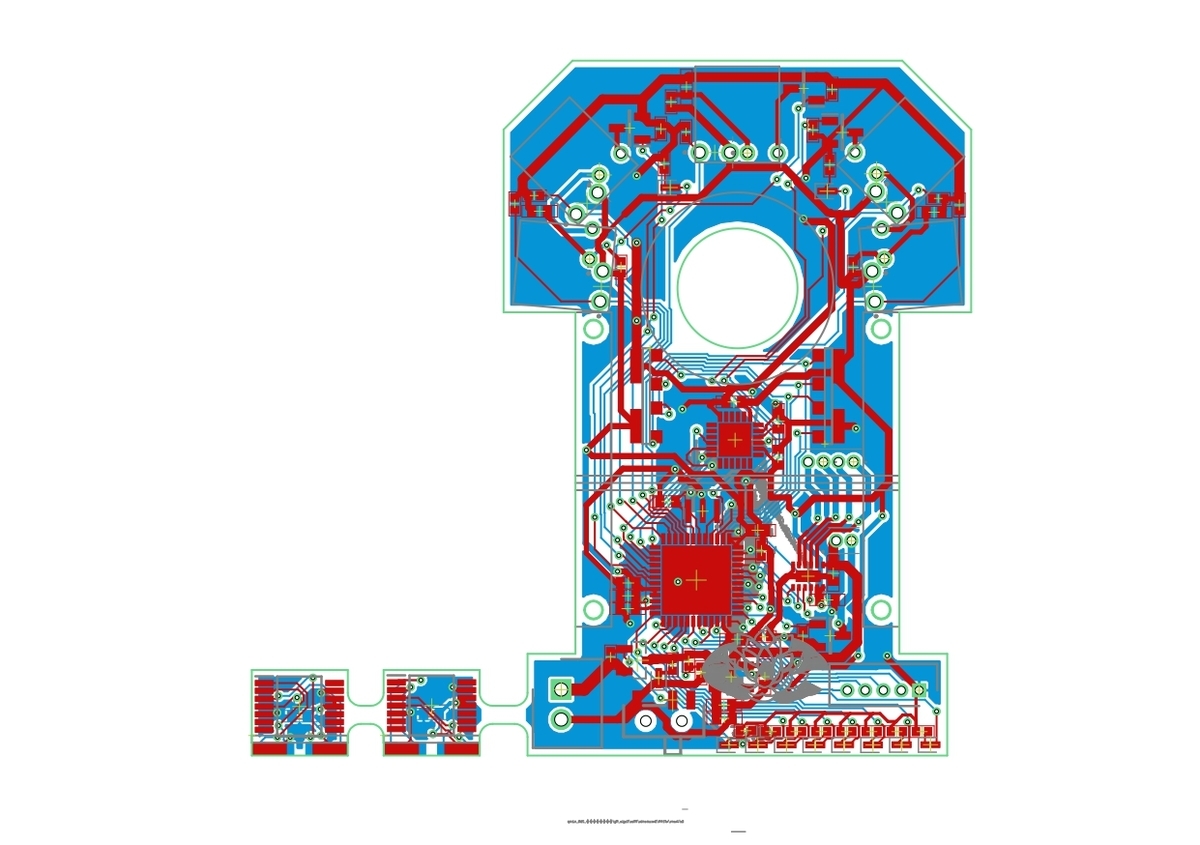
一応これである程度動いています。
LEDの抵抗は適当であとで色ごとに計算やろーって思ってたんですけど忘れてました。
そのせいでLEDに目をやられました。
機械設計
足回りはこんな感じです。いろんなブログを参考して作りました。
不満点を上げるとしたらシャフトとホイールの固定、ホイールとタイヤの固定どうするべきか悩んでます
↓ 解決
シャフトとホイールの固定は紐で圧入
ホイールとタイヤはアクリル用の両面テープ
(なぜかブラウザ版だとホイールがずれる...)
センサの配置はしろめくんと同じ方式です。
変な配置ですよねーこの配置が結構好きです。
吸引の構造はしろめくんよりも重心に近づけました。(前回よりモータの重量の割合が小さくなったので中心に寄せて旋回のイナーシャを下げたかった)
因みに現段階で吸引が弱いで参考にしないでほしいです...
恐らく、スカートの構造が良くない気がします。
1次スカートを用意していたのですが、そのせいで吸引体積が増えて弱くなった気がします。
ソフト設計
特にクラシックからの変更なしですね。
後輩がそろそろ斜めに手を付けそうなので100%自己流の斜めパス圧縮のやり方概説しようと思います(正しいかわからないけど今のところバグなし...)
とりあえず、
直線、スラロームでパスがある前提で話します。
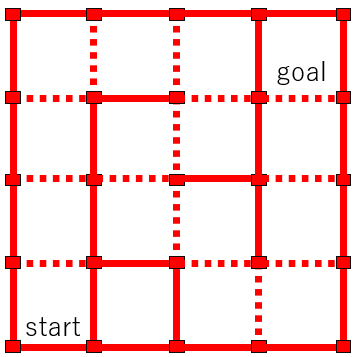
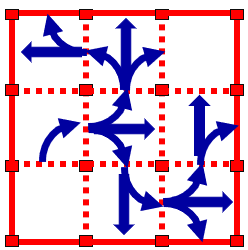
こんな迷路なら
直線(90*5)→右スラローム→直線(90*2)→右スラローム→右スラローム→左スラローム→左スラローム→右スラローム→左スラローム→左スラローム→直進(90*5)
っていうパスが生成されます。
これに対してまず大回りの圧縮します。
直線(90*4)→右大回り→直線(90*1)→右スラローム→右スラローム→左スラローム→左スラローム→右スラローム→左スラローム→左スラローム→直進(90*5)
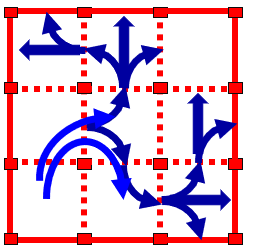
その次に残ってる小回りを処理します。
小回りが始まるところを斜めの入ターンに圧縮します。
(直線右→入右45、直線右右→入右135)
直線(90*4)→右大回り→入右45ターン→左スラローム→左スラローム→右スラローム→左スラローム→左スラローム→直進(90*5)
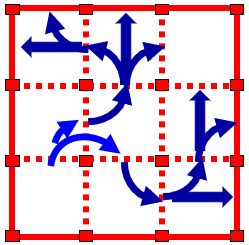
小回りが終わるところ(90,180大回り or 直線)を斜めの出ターンに圧縮します。
(右直線→出右45、右右直線→入右135)
直線(90*4)→右大回り→入右45ターン→左スラローム→左スラローム→右スラローム→出左135ターン→直進(90*4)
あとは入ターンから出ターンの間をV90(右右, 左左の連続)で圧縮していきます。
直線(90*4)→右大回り→入右45ターン→左V90→右スラローム→出左135ターン→直進(90*4)
あまりを斜め直線(右左の交互)に圧縮していきます。
直線(90*4)→右大回り→入右45ターン→左V90→斜め直線(90√2*1)→出左135ターン→直進(90*4)
以上終わり(テキトー)
もうちょい詳しく
一応ターンパターンを説明します。
簡単のため右のみでこんだけのターン分岐があります。
まず大回りの候補は2ルートあります。
これを除いたら入の斜めターンのパターンは45,135の2つになります。
次の出の斜めのパターンは入に対してそれぞれ2つずつあります。
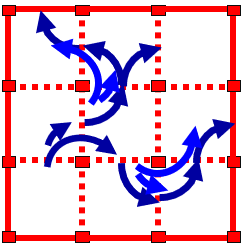
最後にV90と斜め直線は入に対して1個ずつあります。
出の後は直線なのでスタートと同じ繰り返し。
V90と斜め直線の後は入の45,135後と同じ繰り返し。
これによって前ターンの候補が圧縮できます。
前後の動作や角度に依存しないところから圧縮していくと楽になります。
大回り(ターン前後の直線の有無で判別できる)
→入斜め(大回りをすでに圧縮しているため小回りの開始で判別できる)
→出斜め(大回りをすでに圧縮しているため小回りの終了で判別できる)
→V90(既に入出斜めが圧縮されてるため入と出の間で2回同じターンで判別できる)
→斜め直線(残りのターン全て)
説明ベタ or 間違い があるかもしれませんが参考にしてみてください。
(大昔に作ったので記憶があいまい...)
設計目的(設計時はぎり学生)
学生大会でいろんな方に煽られた応援され、アドバイス用に基板をいただいたのでその基板の眺めながら設計を決意しました。
あとは単純に後輩にDCマウスを教えるように設計を復習したいと思ったからです。
目標にしてたのは
- 後輩に説明できるぐらいには考えて設計する(記憶曖昧かも)
- 機体の構成は一般的なマウスでそれで
- しろめくんのオマージュで吸引変則4輪+センサ5つ+裏面のお絵描き
- リフローの練習
- 磁気式エンコーダでのフィルタなどの勉強
- 部品は入手性重視
です。
ここ最近の情勢で,素子の売り切れが多くて苦労しました。
特にマイコンは今まで使ってたf4シリーズがなかったのでメインストリームのg4シリーズを使用しました。
最後に
大会に出るつもりなんてなかったんですけどね...
部室で使ってた道具がないんで壊れたときの修理がつらい
社会人でマウスやるのもつらい
次は草の根出るか...悩んでます。正直ちょい悔しいので。
まぁ、後輩はたくさん来るなら応援にぐらいの気持ちで。
p.s. 新しく机と椅子+迷路を置く台車を買ったのでQOLが爆増しました。